مبانی نظریه مهندسی کنترل ؟
⭕ سرفصل های مطالب:
- 1) مسئله کنترل
- 2) سیستم چیست؟
3) سه مسئله مختلف
4) مسئله شناسایی سیستم
5) مسئله شبیهسازی
6) مسئله کنترل
7) چرا به یک سیستم کنترل بازخورد نیاز داریم؟
8) سیستم کنترل چیست؟
9) منابع
🟦 چکیده مطالب:
این مقاله به معرفی مبانی مهندسی کنترل میپردازد. ابتدا سیستم را به عنوان مجموعهای از اجزای بههمپیوسته تعریف میکند و به سه مسئله اصلی در این حوزه اشاره میکند: شناسایی سیستم (مدلسازی سیستم)، شبیهسازی (پیشبینی رفتار سیستم) و کنترل (تولید ورودی مناسب برای دستیابی به خروجی مطلوب). سپس، ضرورت سیستمهای کنترل بازخورد را توضیح میدهد که با استفاده از اندازهگیری خروجی سیستم و مقایسه آن با مقدار مطلوب، میتوانند به اختلالات واکنش نشان داده و عملکرد سیستم را بهبود بخشند. در نهایت، مفهوم کلی سیستم کنترل را به عنوان مکانیزمی برای تغییر رفتار آینده یک سیستم به سمت حالت مطلوب تشریح میکند و مثالی از آن را در عمل ارائه میدهد. در این مقاله، ما یک مرور کلی از مسئلهی کلی که به عنوان مهندسان سیستم کنترل سعی در حل آن داریم، خواهیم داشت. این، زمینهای برای تمام مطالبی که در فصلهای بعدی پوشش خواهیم داد، فراهم میکند و به نظر من، با انجام این کار، به شما کمک میکند تا بفهمید چرا مباحث ارائه شده در این کتاب را یاد میگیرید.
🔷 سیستم چیست؟
برای شروع، دقیقاً توضیح میدهیم که سیستم چیست. مفهوم آن واقعاً سرراست است، اما از آنجایی که این اصطلاح بسیار کلی است، ما تمایل داریم از این کلمه برای توصیف تقریباً همه چیز استفاده کنیم. این موضوع میتواند برای کسی که تازه وارد این حوزه شده است، گیجکننده باشد، وقتی به چیزی به نام سیستم کنترل اشاره میکنیم که برای کنترل سیستم واقعی استفاده میشود و وقتی این دو بخش در کنار هم قرار میگیرند، سیستم بزرگتری را تشکیل میدهند. به عنوان کسی که در حال یادگیری نظریه کنترل است، این سوال مطرح میشود که من روی چه سیستمی کار میکنم؟ برای پاسخ به این سوال، بیایید با تعریف شروع کنیم و از آنجا شروع کنیم.
"سیستم مجموعهای از اجزای به هم پیوسته است که یک کل بزرگتر و پیچیدهتر را تشکیل میدهند"
پروژههای مهندسی معمولاً پیچیده هستند. تقسیم پروژههای پیچیده به قطعات یا سیستمهای کوچکتر، مشکل را ساده میکند زیرا به افراد اجازه میدهد تا در حوزه عملکردی خود تخصص پیدا کنند و مجبور نباشند در همه زمینهها متخصص باشند. بنابراین، به عنوان یک متخصص، ممکن است فقط روی یکی از بخشهای به هم پیوستهای که کل سیستم را تشکیل میدهند، کار کنید. با این حال، ممکن است لایههای پیچیدگی زیادی وجود داشته باشد، به طوری که بخش کوچکی که روی آن کار میکنید، در واقع یک سیستم پیچیده به خودی خود باشد!
همین امر در مورد متخصصان نظریه کنترل نیز صادق است. به عنوان یک مهندس کنترل، هدف شما ایجاد چیزی است که الزامات عملکردی یا عملکردی تعیین شده برای پروژه را برآورده کند. به طور کلی، ما به مجموعهای از قطعات به هم پیوسته که به طور خاص برای برآورده کردن این الزامات ایجاد شدهاند، سیستم کنترل میگوییم. با این حال، برای هر پروژهای غیر از سادهترین آنها، سیستم کنترل ممکن است مجموعهای از قطعات به هم پیوسته باشد که به متخصصانی مانند متخصصان حسگر، متخصصان محرکها، متخصصان پردازش سیگنال دیجیتال یا متخصصان تخمین حالت نیاز دارد.
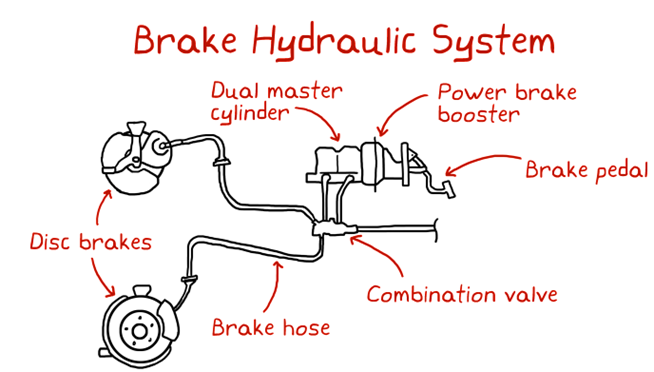
برای روشن شدن این موضوع، تصور کنید که در یک شرکت خودروسازی شغلی پذیرفتهاید و قرار است روی سیستم ترمز کار کنید. در نگاه اول ممکن است گمان کنید که در تمام بخشهای مربوط به کاهش سرعت خودرو مشغول خواهید بود. با این حال، سیستم ترمز خودروی شما قطعات زیادی دارد و برای طراحی کامل محصول به متخصصان مختلفی نیاز است.
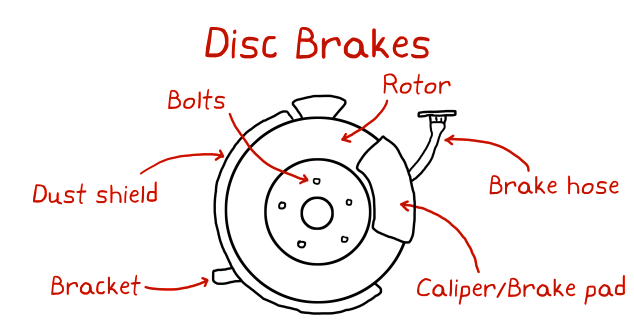
واضحترین جزء، مجموعه ترمز دیسکی در هر چرخ است. این بخشی است که در واقع انرژی جنبشی خودرو را به انرژی گرمایی تبدیل کرده و سرعت خودرو را کاهش میدهد. با این حال، ترمزهای دیسکی به خودی خود سیستمهای کوچکی هستند زیرا از روتورها، کالیپرها، براکتها، محافظها، بستها و شیلنگهایی تشکیل شدهاند که به ترمزهای دیسکی اجازه میدهند به درستی عمل کنند.
درگیر کردن ترمزها به سیستم هیدرولیک ترمز نیاز دارد که وظیفه انتقال فشار اعمال شده توسط پای شما روی پدال ترمز را از طریق تقویت کننده قدرت، سیلندر اصلی دوگانه و سوپاپ ترکیبی و در نهایت به کالیپرهای ترمز در هر یک از چهار چرخ بر عهده دارد.
سیستم ترمز دستی مکانیکی وجود دارد که سیستم هیدرولیک را با یک مسیر کابل ثانویه به ترمزها دور میزند و سیستم چراغ ترمز که وظیفه روشن کردن چراغهای عقب و آن چراغ مزاحم داشبورد را بر عهده دارد که به شما میگوید ترمز دستی درگیر است.
در نهایت، تعدادی سیستم کنترل ترمز الکترونیکی وجود دارد که ورودی انسانی را نادیده میگیرند تا از لیز خوردن وسیله نقلیه روی سطوح لغزنده یا برخورد راننده حواسپرت به ماشین جلویی جلوگیری کنند.

تمام این سیستمهای کوچکتر - ترمزها، هیدرولیک، ترمز دستی، روشنایی و کنترلهای الکترونیکی - قطعات به هم پیوستهای هستند که سیستم ترمز بزرگتر و کامل را تشکیل میدهند. علاوه بر این، سیستم ترمز تنها یکی از قطعات به هم پیوستهای است که خود خودرو را تشکیل میدهند.
به عنوان یک متخصص کنترل در بخش ترمز، ممکن است مسئول نوشتن و آزمایش الگوریتم برای سیستم کنترل ترمز الکترونیکی باشید، اما تأثیر بسیار کمی بر مثلاً مسیر کابل برای ترمز دستی داشته باشید.
تعریف سیستمهای مختلف، امکان وجود پروژههای پیچیده را فراهم میکند، اما این سردرگمی بالقوه را ایجاد میکند که همه چیز به عنوان یک سیستم نامیده شود. برای کاهش این مشکل، بسته به زمینهای که در آن کار میکنید، معمولاً برای هر یک از سطوح مختلف سلسله مراتبی پیچیدگی در یک پروژه، اصطلاحی وجود دارد. به عنوان مثال، چند بخش، یک جزء را ایجاد میکنند که به نوبه خود یک زیرسیستم ایجاد میکند و در نهایت یک سیستم ایجاد میکند. من سعی نمیکنم مرز بین هر یک از این موارد را تعریف کنم زیرا هر صنعت و شرکتی این کار را به طور متفاوتی انجام میدهد. با این حال، مهم است که شما این را تشخیص دهید و مشخص کنید که وقتی کسی از شما میخواهد یک کنترلکننده برای یک سیستم طراحی کنید، به طور خاص به چه چیزی اشاره میکند. در این کتاب سعی خواهم کرد وقتی از سیستم استفاده میکنم، صریح باشم زیرا آنچه به آن اشاره میکنم بر اساس زمینه مسئله تغییر خواهد کرد.
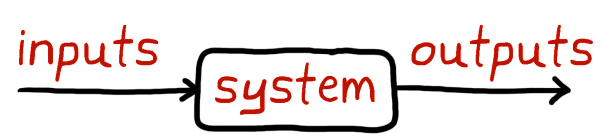
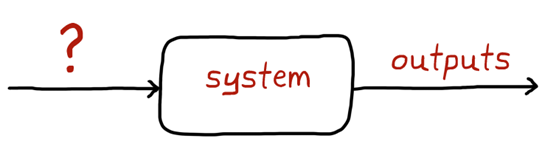
به طور کلی، ما هر سیستمی را به صورت گرافیکی به صورت یک جعبه نمایش میدهیم. فلشهایی که به داخل جعبه میروند، ورودیهای خارجی هستند که بر روی سیستم عمل میکنند. سپس سیستم به مرور زمان به این ورودیها پاسخ میدهد تا یک خروجی تولید کند - که فلشهایی هستند که از جعبه خارج میشوند.
معمولاً ما سیستم را در جعبه با یک مدل ریاضی که معادلات حرکت آن را توصیف میکند، تعریف میکنیم. در حال حاضر نیازی به نگرانی در مورد ریاضیات نداریم، مهمترین چیز این است که بفهمیم این جعبه از نظر فیزیکی به چه معناست. به عنوان مثال، سیستم میتواند بسیار ساده باشد، مانند یک ترمز دیسکی که ورودیهای آن نیروی سیال هیدرولیک و خروجی آن دمای روتور است. یا سیستم میتواند پیچیده باشد، مانند کل ماشین و صدها ورودی و هزاران خروجی داشته باشد.
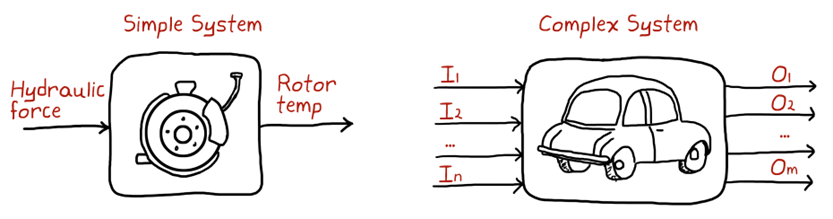
اگرچه در هر دو مورد، نمایش گرافیکی ما مشابه خواهد بود، یک جعبه با فلشهایی که به آن وارد و فلشهایی که از آن خارج میشوند. بعداً چندین سیستم (جعبه) را به هم متصل خواهیم کرد تا نمودارهای بلوکی پیچیده ایجاد کنیم. این نمودارهای بلوکی شامل بخشهای به هم پیوسته مرتبط از یک سیستم حتی بزرگتر خواهند بود. با این حال، برای بخش بعدی، این نمایش تک جعبهای به ما بینشی در مورد سه نوع مختلف از مشکلاتی که در طول این کتاب و به عنوان مهندسان شاغل با آنها روبرو خواهیم شد، میدهد.
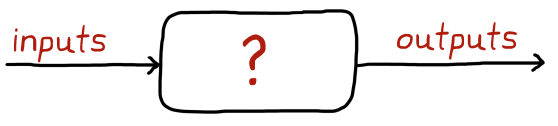
سه مسئلهی مختلف
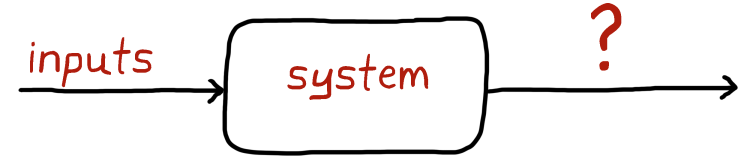
متوجه خواهید شد که نمودار بلوکی سادهی ما از سه بخش تشکیل شده است؛ خودِ جعبه که نشاندهندهی یک سیستم است، ورودیهایی که سیستم را هدایت میکنند و خروجیهایی که سیستم تولید میکند. در هر زمان، یکی از این سه بخش برای شما ناشناخته است و هر بخشی را که نمیدانید، مسئلهای را که سعی در حل آن دارید، تعریف میکند.
مسئله شناسایی سیستم
به عنوان یک دانشجو، معمولاً در ابتدای مسئله، یک مدل ریاضی از سیستم خود به شما داده میشود و سپس از شما خواسته میشود که آن را تجزیه و تحلیل کنید یا یک سیستم کنترلی حول آن طراحی کنید. با این حال، به عنوان یک مهندس شاغل، همیشه مدلی از سیستم شما به شما داده نمیشود، بلکه باید خودتان آن را تعیین کنید. تعیین مدل ریاضی از طریق فرآیندی به نام شناسایی سیستم انجام میشود.
اگر متوجه شدید که سوالات زیر را میپرسید، ممکن است در حال انجام شناسایی سیستم باشید:
• چگونه میتوانم سیستمی را که سعی در کنترل آن دارم مدلسازی کنم؟
• دینامیکهای مربوط به سیستم من چیست (چه چیزی را باید مدلسازی کنم)؟
• معادله ریاضی که ورودیهای شناخته شده من را به خروجیهای اندازهگیری شده من تبدیل میکند چیست؟
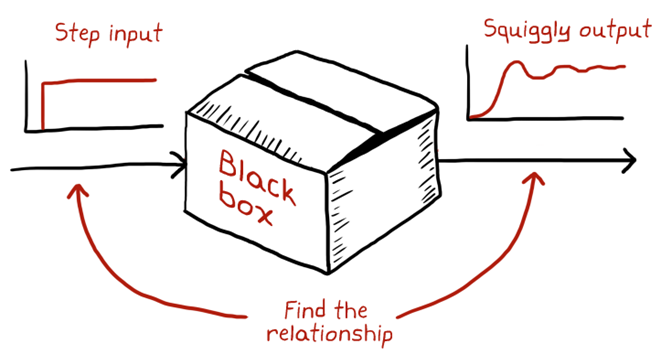
حداقل دو روش کلی برای پاسخ به این سوالات وجود دارد. روش اول به عنوان روش جعبه سیاه شناخته میشود. تصور کنید جعبهای به شما داده شده است که نمیتوانید آن را باز کنید، اما از شما خواسته شده است که مدلی از آنچه درون آن است بسازید. میتوانید آنچه را که درون جعبه است در معرض ورودیهای شناخته شده مختلف قرار دهید، خروجیهای حاصل را اندازهگیری کنید و سپس بر اساس رابطه بین این دو، آنچه را که درون جعبه است استنباط کنید.
روش دوم برای شناسایی سیستم، روش جعبه سفید نامیده میشود. تصور کنید که اکنون میتوانید دقیقاً آنچه را که درون جعبه است ببینید - تمام قطعات الکترونیکی، مکانیزمها و نرمافزار. با دانستن اجزای سیستم، میتوانید معادلات ریاضی دینامیک را مستقیماً بنویسید. این دقیقاً همان کاری است که شما هنگام استفاده از معادلات حرکت نیوتن یا تعیین معادلات حرکت بر اساس انرژی موجود در سیستم انجام میدهید.
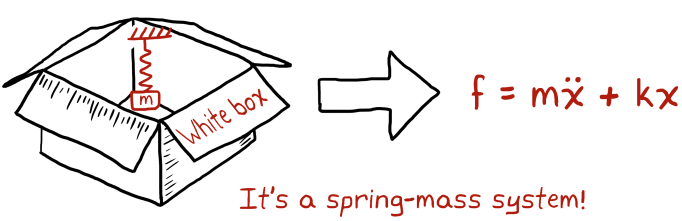
ممکن است استدلال کنید که برای نوشتن معادلات حرکت نیازی به دانستن ورودیها یا خروجیها ندارید، اما این درست نیست. حتی با این روش جعبه سفید نیز نیاز به تنظیم آزمایشی با ورودیهای معلوم و خروجیهای اندازهگیری شده وجود خواهد داشت تا بتوانید پارامترهای منحصر به فرد سیستم خود را بدست آورید. به عنوان مثال، ممکن است لازم باشد یک فنر خطی را مدلسازی کنید - معادله حرکت آن کاملاً شناخته شده است - اما باید یک آزمایش کشش انجام دهید تا ثابت فنر دقیق آن را تعیین کنید.
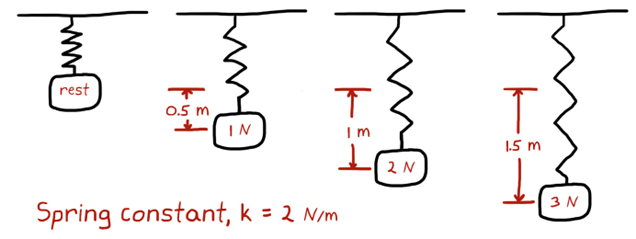
برای این آزمایش، ورودی نیرویی است که جرم به فنر وارد میکند و خروجی طول کشیده شده فنر است. از رابطه بین نیروهای ورودی و طولهای خروجی میتوانیم بگوییم که ثابت فنر ۲ نیوتن بر متر است. شناسایی سیستم بخش مهمی از طراحی یک سیستم کنترل است و بنابراین در فصل بعدی با جزئیات بیشتری در مورد آن بحث خواهیم کرد.
مسئله شبیهسازی
اگر ورودیها و دینامیک سیستم را بدانیم، میتوانیم از طریق شبیهسازی پیشبینی کنیم که سیستم چگونه رفتار خواهد کرد. این مسئله جالب است زیرا احتمالاً بیشتر زمان طراحی خود را در این مرحله خواهید گذراند. نکته کلیدی در اینجا این است که بفهمید مجموعه ورودیهای معنادار و محدوده آنها چیست تا ایده کاملی از نحوه رفتار سیستم خود داشته باشید.
اگر متوجه شدید که سوالات زیر را میپرسید، ممکن است نیاز به اجرای یک شبیهسازی داشته باشید:
• آیا مدل سیستم من با دادههای آزمایشی من مطابقت دارد؟
• آیا سیستم من در تمام محیطهای عملیاتی کار خواهد کرد؟
• اگر آن را با دستورات بالقوه مخرب هدایت کنم، سیستم من چگونه رفتار میکند؟
برای اینکه ببینید شبیهسازی چقدر مهم است، تصور کنید که یک مدل بسیار خوب از یک هواپیمای مسافربری دارید و در حال طراحی یک سیستم کنترل ارتفاع برای آن هستید. میخواهید بدانید که سیستم شما در کل پوشش عملیاتی چگونه رفتار میکند و رویکردهای مختلفی را که میتوانید اتخاذ کنید، میسنجید. میتوانید از یک هواپیمای آزمایشی استفاده کنید و با آن در هر شرایط عملیاتی که میتواند در طول عمر خود ببیند، پرواز کنید و مستقیماً رفتار آن را مشاهده کنید. مشکل این است که پوشش عملیاتی بسیار بزرگ است و کمپینهای آزمایش پرواز گران هستند و بنابراین به حداقل رساندن زمان پرواز میتواند در پروژه شما صرفهجویی زیادی کند. همچنین اگر سعی دارید محدودیتهای سیستم خود را برای دیدن واکنش آن افزایش دهید، انجام آزمایشهای پرواز میتواند خطرناک باشد. به جای ریسک بودجه پروژه و جان احتمالی انسان، شبیهسازی سیستم شما منطقیتر است.
مسئله کنترل
اگر سیستم را بشناسیم و بدانیم که میخواهیم خروجیهای سیستم چگونه رفتار کنند، میتوانیم ورودیهای مناسب را از طریق روشهای مختلف کنترل تعیین کنیم. این مسئله کنترل است - چگونه ورودی مناسب سیستم را تولید کنیم که خروجی مورد نظر را تولید کند؟ نظریه کنترل ابزارهای لازم برای طراحی یک سیستم کنترل را در اختیار شما قرار میدهد که ورودی مورد نیاز را به سیستم تولید میکند. بدون نظریه کنترل، طراح به انتخاب یک سیستم کنترل از طریق آزمون و خطا محدود میشود.
اگر متوجه شدید که سوالات زیر را میپرسید، ممکن است نیاز به طراحی یک سیستم کنترل داشته باشید:
• چگونه میتوانم سیستم خود را به الزامات عملکردیام برسانم؟
• چگونه میتوانم فرآیندی را که در حال حاضر انسان در آن دخیل است، خودکار کنم؟
• سیستم من چگونه میتواند در یک محیط پویا و پر سر و صدا کار کند؟
این کتاب ابزارهای اساسی مورد نیاز برای حل مشکل کنترل را ارائه میدهد و با انجام این کار، فکر میکنم متوجه خواهید شد که نظریه کنترل میتواند چالش برانگیز اما بسیار سرگرم کننده و بسیار شهودی باشد. قبل از اینکه به یادگیری این ابزارها بپردازیم، بیایید یک قدم به عقب برداریم و با جزئیات بیشتری توضیح دهیم که چرا در وهله اول به سیستمهای کنترل نیاز داریم.
چرا به یک سیستم کنترل بازخورد نیاز داریم؟
بیایید با نمودار بلوکی سیستم ساده خود شروع کنیم، اما اکنون جعبه فقط هر سیستمی نیست، بلکه به طور خاص سیستمی است که میخواهیم کنترل کنیم. از این به بعد به سیستمی که کنترل میشود، فرآیند میگوییم. ورودیهای فرآیند، متغیرهایی هستند که به آنها دسترسی داریم و میتوانیم بر اساس هر طرح کنترلی که انتخاب میکنیم، آنها را تغییر دهیم، بنابراین به آنها متغیرهای دستکاری شده میگوییم.
این متغیرها توسط یک محرک (actuator) دستکاری میشوند. محرک یک اصطلاح عمومی است که به دستگاه یا موتوری اشاره دارد که مسئول کنترل یک سیستم است. از آنجایی که محرک یک دستگاه فیزیکی است و معمولاً در خود فرآیند تعبیه شده است، میتوان به مجموعهای از فرآیند و محرکها به عنوان یک سیستم واحد که آن را کارخانه مینامیم، اشاره کرد.

محرکها توسط یک سیگنال محرک که توسط کنترلکننده تولید میشود، هدایت میشوند. کنترلکننده بهطور خاص برای تبدیل یک متغیر فرمان داده شده - که از کسی که این دستگاه را اداره میکند یا از یک سیستم کنترل سطح بالاتر میآید - به سیگنالهای محرک مناسب طراحی شده است. در این مرحله، ما اولین و سادهترین سیستم کنترل خود را داریم. به عنوان اپراتورها، اکنون میتوانیم مجموعهای از دستورات از پیش تعیینشده را انتخاب کنیم که از طریق کنترلکننده خود اجرا میکنیم. این کار دستورات محرک حاصل را تولید میکند که به نوبه خود بر متغیر دستکاری شده تأثیر میگذارند و سپس فرآیند را به روشی که ما میخواهیم تحت تأثیر قرار میدهند. این نوع سیستم کنترل به عنوان حلقه باز شناخته میشود زیرا هیچ بازخوردی از خروجی فرآیند وجود ندارد.
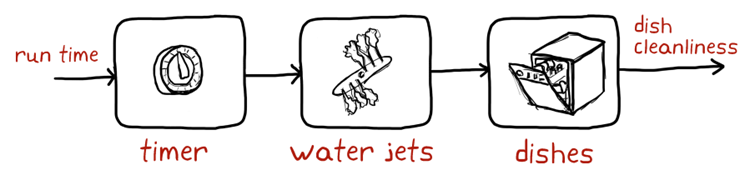
سیستمهای کنترل حلقه باز معمولاً برای فرآیندهای سادهای که رفتارهای ورودی به خروجی کاملاً تعریفشدهای دارند، در نظر گرفته میشوند. یک نمونه رایج خانگی از یک سیستم کنترل حلقه باز، ماشین ظرفشویی است. این یک سیستم حلقه باز است زیرا به محض اینکه کاربر تایمر شستشو را تنظیم میکند، ماشین ظرفشویی برای آن زمان تعیینشده کار میکند. این موضوع صرف نظر از اینکه ظروف واقعاً تمیز باشند یا نه، پس از اتمام کار، صادق است. اگر ظروف از ابتدا تمیز باشند، ماشین ظرفشویی همچنان برای زمان تعیینشده کار میکند و اگر ماشین ظرفشویی را پر از قابلمههای کثیف کنید، ممکن است زمان تعیینشده برای تمیز کردن کامل آنها کافی نباشد و باید دوباره کار کند. ما این ناکارآمدی را در زمان کار ماشین ظرفشویی میپذیریم زیرا فرآیند شروع (ظروف کثیفی که میخواهیم تمیز شوند) عموماً شناخته شده است و بنابراین زمان لازم برای تمیز کردن آنها کاملاً ثابت است.
با این حال، تولیدکنندگان میدانند که گاهی اوقات شما ماشین ظرفشویی را با قابلمههای کثیف پر میکنید و میخواهید مدت زمان بیشتری کار کند. به جای ساخت یک سیستم حلقه بسته پیچیده، آنها با اضافه کردن دستورات از پیش تعیین شده اضافی، این مشکل را حل کردهاند؛ یعنی چندین نوع چرخه تمیز کردن را اضافه میکنند که در زمانها و دماهای مختلف اجرا میشوند. سپس این به کاربر بستگی دارد که مجموعه صحیح دستورات را برای رسیدن به اثر دلخواه انتخاب کند.
با این حال، برای هر فرآیند دلخواه، یک سیستم کنترل حلقه باز معمولاً کافی نیست. دلیل این امر این است که اختلالاتی وجود دارند که بر سیستم شما تأثیر میگذارند و ماهیتاً تصادفی و خارج از کنترل شما هستند. علاوه بر این، خود فرآیند ممکن است تغییراتی داشته باشد که شما انتظار ندارید یا برای آنها آماده نیستید. تغییرات فرآیند و اختلالات خارجی، رفتار سیستم شما را تغییر میدهند - معمولاً به صورت منفی - و یک سیستم حلقه باز قادر به پاسخگویی به آنها نخواهد بود زیرا هیچ اطلاعی از تغییرات در خروجی فرآیند ندارد.
خب، در این مورد چه کاری میتوانیم انجام دهیم؟ ما به سیستم خود بازخورد اضافه میکنیم! ما این واقعیت را میپذیریم که اختلالات و تغییرات فرآیند بر متغیر کنترلشده تأثیر میگذارند. با این حال، به جای تحمل خطای حاصل، یک حسگر اضافه میکنیم که متغیر کنترلشده را اندازهگیری کرده و آن را به کنترلکننده ما منتقل میکند. اکنون میتوانیم متغیر حسشده را با متغیر فرمان دادهشده مقایسه کنیم و یک عبارت خطا ایجاد کنیم. عبارت خطا معیاری است که نشان میدهد فرآیند چقدر از جایی که میخواهید باشد، فاصله دارد و کنترلکننده میتواند از این برای تولید یک سیگنال محرک مناسب استفاده کند که سپس یک متغیر دستکاریشده مناسب تولید میکند که در نهایت بر فرآیند تأثیر میگذارد به گونهای که عبارت خطا را کاهش میدهد. زیبایی سیستم کنترل بازخورد - یا یک سیستم کنترل حلقه بسته - این است که میتواند با رساندن مداوم عبارت خطا به صفر، به طور خودکار به تغییرات متغیر کنترلشده واکنش نشان دهد.

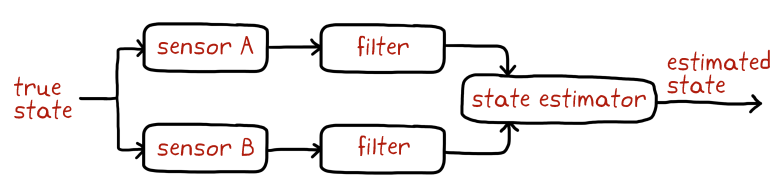
ساختار بازخورد بسیار قدرتمند و مقاوم است که آن را به عنوان یک ابزار کنترلی ضروری میکند. متأسفانه، با اضافه شدن ساختار بازخورد، مشکلات جدیدی ایجاد میشود که اکنون باید به آنها بپردازیم. ما باید در مورد دقت متغیر کنترلشده در حالت پایدار، سرعتی که سیستم میتواند به تغییرات پاسخ دهد و اختلالات را رد کند، و پایداری سیستم به طور کلی فکر کنیم. همچنین، ما حسگرهایی را اضافه کردهایم که دارای نویز و سایر بیدقتیهایی هستند که به حلقه ما تزریق میشوند و بر عملکرد تأثیر میگذارند. برای مقابله با این مشکل آخر، میتوانیم حسگرهای اضافی اضافه کنیم که متغیرهای حالت مختلف را اندازهگیری میکنند، آنها را فیلتر میکنیم تا نویز را کاهش دهیم و سپس آنها را با هم ترکیب میکنیم تا تخمین دقیقتری از حالت واقعی ایجاد کنیم. اینها برخی از ابزارهایی هستند که میتوانیم به عنوان طراحان سیستم به کار گیریم و بخشی از آنچه در ادامه این کتاب پوشش خواهیم داد.
سیستم کنترل چیست؟
از چند بخش اول، احتمالاً درک مبهمی از سیستم کنترل دارید. ممکن است فکر کنید که چیزی است که باعث میشود یک سیستم به صورت خودکار رفتار کند یا چیزی است که به یک سیستم اجازه میدهد بدون دخالت انسان کار کند. این تا حدی درست است، اما تعریف واقعی آن گستردهتر از آن چیزی است که فکر میکنید.
"یک سیستم کنترل، مکانیزمی است که رفتار (یا وضعیت آینده) یک سیستم را تغییر میدهد"
به نظر میرسد تقریباً هر چیزی را میتوان یک سیستم کنترل در نظر گرفت، درست است؟ خب، یکی از ویژگیهای تعیینکننده یک سیستم کنترل این است که رفتار آینده سیستم باید به سمت حالتی که مطلوب است، گرایش داشته باشد. این بدان معناست که، به عنوان طراح، شما باید بدانید که از سیستم خود چه میخواهید و سپس سیستم کنترل خود را طوری طراحی کنید که آن نتیجه مطلوب را ایجاد کند.
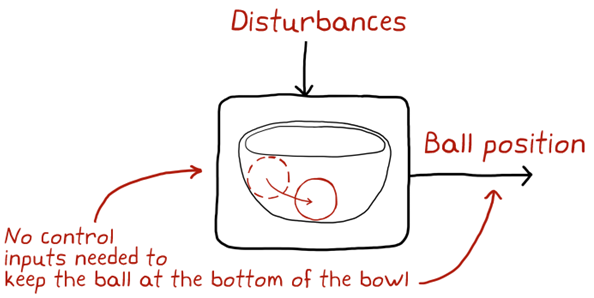
در برخی موارد بسیار نادر، سیستم به طور طبیعی همانطور که شما میخواهید رفتار میکند و نیازی به ورودی خاصی از طراح ندارد. به عنوان مثال، اگر سیستمی میخواهید که یک توپ را در ته کاسه نگه دارد، نیازی به طراحی یک سیستم کنترل نخواهید داشت زیرا سیستم به طور طبیعی به این شکل عمل میکند. وقتی توپ تکان میخورد، همیشه به خودی خود به سمت ته کاسه برمیگردد.
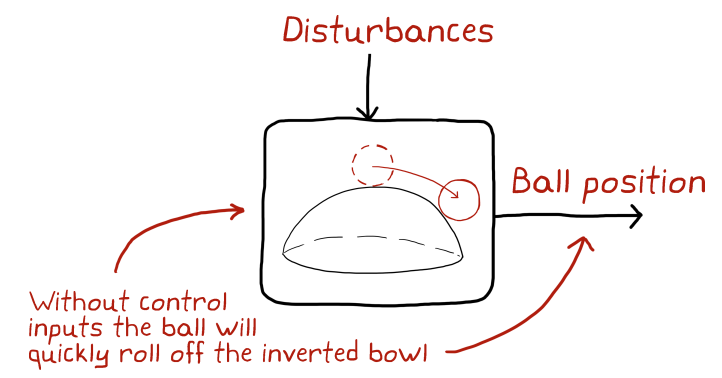
با این حال، اگر سیستمی میخواستید که یک توپ را در بالای یک کاسه وارونه نگه دارد، باید یک سیستم کنترل برای انجام این کار طراحی میکردید. دلیل این امر این است که وقتی توپ تکان میخورد، به طور طبیعی به مرکز برنمیگردد، بلکه در عوض به غلتیدن از کنار کاسه وارونه ادامه میدهد.
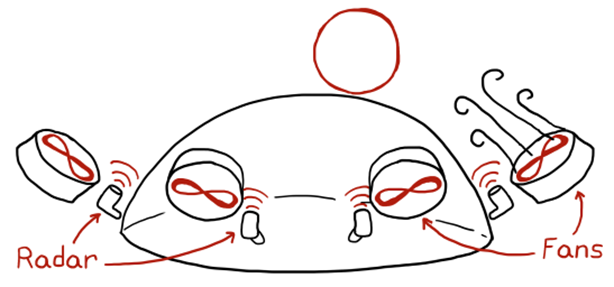
تعدادی سیستم کنترل مختلف وجود دارد که در اینجا کار میکنند. هیچ پاسخ درستی وجود ندارد، اما اجازه دهید یک راه حل ممکن پیشنهاد کنم - حتی اگر کاملاً خیالی و نه چندان عملی باشد. مجموعهای از تفنگهای راداری تشخیص موقعیت و پنکههای تولید باد را تصور کنید که در اطراف لبه کاسه قرار گرفتهاند. با منحرف شدن توپ از بالای کاسه، پنکهای که به آن نزدیکتر است روشن میشود و توپ را به بالا میراند.
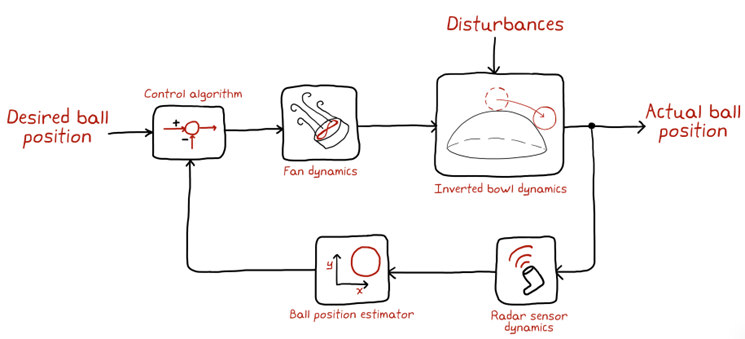
مجموعه فنها، تفنگهای راداری، تخمینگرهای موقعیت و الگوریتمهای کنترل، به عنوان یک سیستم کنترل در نظر گرفته میشوند، زیرا با هم رفتار توپ و دینامیک کاسه معکوس را تغییر میدهند. با این حال، مهمتر از آن، آنها توپ را به سمت حالت مطلوب - بالای کاسه معکوس - هدایت میکنند. اگر هر بخش به هم پیوسته را به عنوان سیستم کوچک خود در نظر بگیریم، نمودار بلوکی کل سیستم بازخورد چیزی شبیه به این خواهد بود:
این یک روش بسیار طبیعی برای تقسیم پروژه نیز هست، زیرا به چندین متخصص کنترل اجازه میدهد تا برای رسیدن به یک هدف مشترک با هم همکاری کنند. به جای اینکه همه سعی کنند تمام بخشهای یک سیستم کنترل پیچیده را توسعه دهند، هر فرد مسئول طراحی و آزمایش قطعه خود خواهد بود. شخصی مسئول انتخاب تفنگ راداری مناسب و توسعه الگوریتم تخمین موقعیت گوی خواهد بود. شخص دیگری مسئول ساخت فنها و قطعات الکترونیکی برای راهاندازی آنها خواهد بود. در نهایت، شخص سوم مسئول توسعه الگوریتم کنترل و تعیین الزامات سیستم برای متخصصان فن و رادار خواهد بود. این سه مهندس متعادلکننده گوی با هم تیم سیستم کنترل را تشکیل میدهند.
منابع:
Fundamentals of Control Theory by Brian Douglas
C. H. Houpis, S. N. Sheldon, and J. J. D'Azzo, Linear Control System Analysis and Design, 5th ed. Boca Raton, FL: CRC Press, 2013
Y. Bavafa-Toosi, Introduction to Linear Control Systems. Amsterdam, Netherlands: Elsevier, 2017
K. Ogata, Modern Control Engineering, 5th ed. Upper Saddle River, NJ: Pearson, 2010
N. S. Nise, Control Systems Engineering, 6th ed. Hoboken, NJ: John Wiley & Sons, 2011
C.-T. Chen, Linear System Theory and Design, 3rd ed. New York, NY: Oxford University Press, 1999
G. F. Franklin, J. D. Powell, and A. Emami-Naeini, Feedback Control of Dynamic Systems, 7th ed. Boston, MA: Pearson, 2014
#کنترل_خطی #کنترل_مدرن #کنترل_مقاوم #کنترل_فازی #کنترل_کنترل_هوشمند #کنترل_دیجیتال #کنترل_پیش_بین_مبتنی_بر_مدل #کنترل_بهینه #کنترل_چند_متغییره #کنترل_کلاسیک #کنترل_اتوماتیک #کنترل_عصبی #کنترل_چند_عاملی #کنترل_شبکهای #کنترل_تطبیقی #کنترل #کنترل_غیر_خطی #مهندسی_کنترل #متلب #سیمولینک#متلب_سیمولینک #تابع_تبدیل #معادلات_حالت #مدل_سازی #شبیهسازی #کنترل_مبتنی_بر_داده #کنترل_سیستم #سیستم #بهینه_سازی #سنسور #فیدبک #بازخورد